Department of Mechanical and Aerospace Engineering Seminar - 1. Nature's Flying Machines: Lessons for Small Aerial Robots (Speaker: Prof. Pakpong Chirarattananon) 2. Agile, robust, and multifunctional micro-aerial-robots powered by soft artificial muscles (Speaker: Prof. Kevin CHEN)
Supporting the below United Nations Sustainable Development Goals:支持以下聯合國可持續發展目標:支持以下联合国可持续发展目标:
Title : Nature's Flying Machines: Lessons for Small Aerial Robots (Speaker: Prof. Pakpong Chirarattananon)

Recent years have seen rapid progress in the development of small flying robots, enabled by advances in materials, manufacturing, and control. However, flying at small scales poses fundamental challenges, including low Reynolds numbers that make flight inefficient and limited payload capacities that constrain battery size. These challenges have motivated roboticists to look to biology for inspiration, including insects with highly efficient flapping-wing flight. This talk will explore how bio-inspired design is enabling a new generation of small aerial robots that can achieve more with fewer components and less power. Examples will include flapping-wing robots that harness passive aerodynamic mechanisms, as well as revolving-wing drones and multimodal multirotors that leverage unsteady aerodynamics and versatile forms of locomotion. By drawing inspiration from biology, and focusing on minimalist design, these new robots are overcoming the power and weight constraints that have long limited small-scale flight.
Title : Agile, robust, and multifunctional micro-aerial-robots powered by soft artificial muscles (Speaker: Prof. Kevin CHEN)
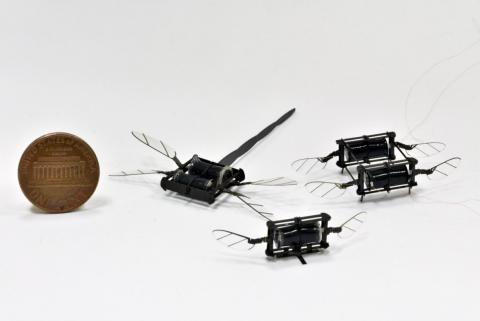
Recent advances in microrobotics have demonstrated remarkable locomotive capabilities such as hovering flights, impulsive jumps, and fast running in insect-scale robots. However, most microrobots that are powered by power-dense rigid actuators have not achieved insect-like collision resilience. In this talk, I will present our recent effort in developing a new class of microrobots – ones that are powered by high bandwidth soft actuators and equipped with rigid appendages for effective interactions with environments. Towards improving collision robustness of micro-aerial robots, we develop the first heavier-than-air aerial robot powered by soft artificial muscles that demonstrates a 40-second hovering flight. In addition, our robot can recover from an in-flight collision and perform a somersault within 0.16 seconds. The robot’s maximum lift is comparable to that of the best rigid-powered sub-gram robots. This work demonstrates for the first time that soft aerial robots can achieve agile and robust flight capabilities absent in rigid-powered micro-aerial vehicles, thus showing the potential of a new class of hybrid soft-rigid robots.
Pakpong Chirarattananon is an Associate Professor in the Departments of Biomedical Engineering and Mechanical Engineering at City University of Hong Kong. He received his Ph.D. in Engineering Sciences from Harvard University in 2014 and his M.Phil. in Computational Biology and B.A. in Natural Sciences from the University of Cambridge. His research focuses on biologically-inspired robotic systems, micro aerial vehicles, and hybrid locomotion. Recently, he developed revolving-wing drones, flapping-wing robots, and multimodal multirotors, with related publications in Science, Nature, and Science Robotics. He uses intelligent mechanisms to solve dynamics and control problems, and enhances the performance of robotic devices through improved understanding of interactions between mechanical design, actuation, dynamics, control, and environmental factors. He has received several best paper awards, including the 2021 IEEE Transactions on Robotics King-Sun Fu Memorial Best Paper Award.

Kevin Chen is currently the D. Reid Weedon, Jr. ’41 Career Development Assistant Professor at the Department of Electrical Engineering and Computer Science, MIT, USA. He received his PhD in Engineering Sciences at Harvard University in 2017 and his bachelor’s degree in Applied and Engineering Physics from Cornell University in 2012. His research interests include developing high bandwidth and robust soft actuators for microrobot manipulation and locomotion. He has published in top journals including Nature, Science Robotics, Advanced Materials, PNAS, Nature Communications, IEEE TRO, and Journal of Fluid Mechanics. He is a recipient of the NSF CAREER award, the TRO 2021 best paper award, the RAL 2020 best paper award, the IROS 2015 best student paper award, the RAL 2021 Outstanding Associate Editor award, and a Harvard Teaching Excellence Award.